Jonh Edson Ribeiro de Carvalho | IC-UFF
Computação Visual e Interfaces
Capítulo 4. Transformações geométricas
- Índice
- 4.1. Descrição do programa braco.c
- 4.2. Exercícios
O propósito desta lição é compreender como as transformações geométricas são realizadas sobre os objetos em relação a um determinado sistema de coordenadas. No OpenGL existem funções para realizar translação, rotação e escalamento, bastando apenas ao usuário ajustar os seus parâmetros para obter o efeito desejado. Será analisado um modelo simples de um braço robótico, constituído de braço e antebraço, como mostra a Figura 4-1
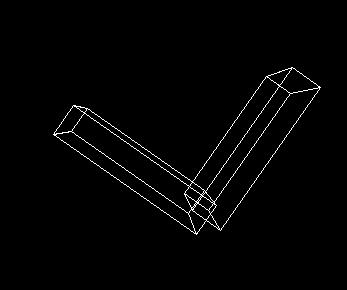
O programa que implementa o braço robótico é mostrado no Exemplo 4-1. As teclas s e S servem para girar o ombro do braço robótico (shoulder) para um lado e para o outro; as teclas e e E, por sua vez, controlam o giro do cotovelo (elbow). Para finalizar o programa, basta digitar ESC. As teclas e suas respectivas ações estão definidas na função keyboard().
#include <GL/glut.h>
#include <stdlib.h>
static int shoulder = 0, elbow = 0;
void init(void){
glClearColor (0.0, 0.0, 0.0, 0.0);
}
void display(void){
glClear (GL_COLOR_BUFFER_BIT);
glPushMatrix();
/* origem posicionada no ombro */
glTranslatef (-1.0, 0.0, 0.0);
glRotatef ((GLfloat) shoulder, 0.0, 0.0, 1.0);
/* origem posicionada no centro do braço */
glTranslatef (1.0, 0.0, 0.0);
glPushMatrix();
glScalef (2.0, 0.4, 1.0);
glutWireCube (1.0);
glPopMatrix();
/* origem posicionada no cotovelo */
glTranslatef (1.0, 0.0, 0.0);
glRotatef ((GLfloat) elbow, 0.0, 0.0, 1.0);
glTranslatef (1.0, 0.0, 0.0);
glPushMatrix();
glScalef (2.0, 0.4, 1.0);
glutWireCube (1.0);
glPopMatrix();
/* origem volta para o sistema de coordenadas original */
glPopMatrix();
glutSwapBuffers();
}
void reshape (int w, int h){
glViewport (0, 0, (GLsizei) w, (GLsizei) h);
glMatrixMode (GL_PROJECTION);
glLoadIdentity ();
gluPerspective(65.0, (GLfloat) w/(GLfloat) h, 1.0, 20.0);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
glTranslatef (0.0, 0.0, -5.0);
}
void keyboard (unsigned char key, int x, int y){
switch (key) {
case 's':
shoulder = (shoulder + 5) % 360;
glutPostRedisplay();
break;
case 'S':
shoulder = (shoulder - 5) % 360;
glutPostRedisplay();
break;
case 'e':
elbow = (elbow + 5) % 360;
glutPostRedisplay();
break;
case 'E':
elbow = (elbow - 5) % 360;
glutPostRedisplay();
break;
case 27:
exit(0);
break;
default:
break;
}
}
int main(int argc, char** argv){
glutInit(&argc, argv);
glutInitDisplayMode (GLUT_DOUBLE | GLUT_RGB);
glutInitWindowSize (500, 500);
glutInitWindowPosition (100, 100);
glutCreateWindow (argv[0]);
init ();
glutDisplayFunc(display);
glutReshapeFunc(reshape);
glutKeyboardFunc(keyboard);
glutMainLoop();
return 0;
} |
Para compilar e executar o programa braco.c, salve-o juntamente com o arquivo Makefile em um diretório e execute a seguinte seqüência de comandos:
$ make braco
$ braco |
4.1. Descrição do programa braco.c
static int shoulder = 0, elbow = 0; |
As variáveis shoulder e elbow guardam o ângulo de rotação do ombro e o ângulo formado entre o braço e o antebraço do robô, respectivamente.
void display(void)
{
glClear (GL_COLOR_BUFFER_BIT);
glPushMatrix(); |
Uma vez que as transformações geométricas no espaço são representadas por matrizes, o uso de uma pilha de matrizes de transformação ajuda a lembrar a seqüência de transformações realizadas. No OpenGL, esta facilidade é provida pelas funções glPushMatrix(), que insere a matriz de transformação corrente na pilha, e glPopMatrix(), que retira a matriz do topo da pilha e torna esta última a matriz de transformação corrente. Neste exemplo, a função glPushMatrix() serve para lembrar os parâmetros de translação, rotação e escalamento no início das operações de desenho.
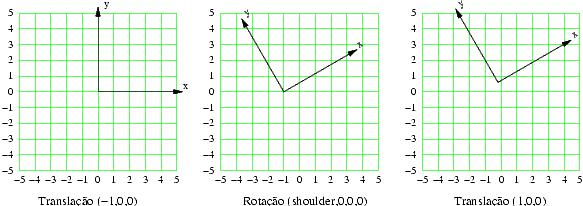
glTranslatef (-1.0, 0.0, 0.0); glRotatef ((GLfloat) shoulder, 0.0, 0.0, 1.0); glTranslatef (1.0, 0.0, 0.0); |
A origem do sistema de coordenadas é levado para o ponto (x,y,z)=(-1,0,0) através da função glTranslatef(), definindo a coordenada de origem (pivô) para o ombro do braço robótico. Em seguida, usando a função glRotatef(), o sistema de coordenadas é rotacionado de modo, definindo a orientação do braço.
A função glRotate() possui o seguinte protótipo:
void glRotate(GLfloat angle, GLfloat x, GLfloat y, GLfloat z);
Quando chamada, glRotate() efetua uma rotação de angle graus no sistema de coordenadas na direção contra o sentido do relógio em torno de um vetor que vai da origem ao ponto (x,y,z)
A função glTranslatef(), por sua vez, retorna a origem do sistema de coordenadas para o centro do braço. As etapas desta transformação são mostradas na Figura 4-2.
glPushMatrix(); glScalef (2.0, 0.4, 1.0); glutWireCube (1.0); glPopMatrix(); |
Mais uma vez, a matriz de transformação corrente é armazenada na pilha, agora para restringir o efeito da função glScale(). A função glScale() altera a escala dos eixos x, y e z. A função glutWireCube() desenha um cubo centrado na origem do sistema de coordenadas com aresta de tamanho unitário, conforme o argumento que lhe foi passado. Quando a função glPopMatrix() é chamada, a matriz de transformação do topo da pilha passa a vigorar, fazendo com que o cubo seja distorcido, assumindo a forma de um parelepípedo. A origem do sistema de coordenadas volta a ser o centro do braço.
glTranslatef (1.0, 0.0, 0.0); glRotatef ((GLfloat) elbow, 0.0, 0.0, 1.0); glTranslatef (1.0, 0.0, 0.0); |
A origem do sistema de coordenadas é levada agora para a ponta do braço com a função glTranslate(), demarcando o novo pivõ para rotação: o cotovelo do robô. A rotação é realizada com a função glRotate() e em seguida a origem do sistema de coordenadas é levada para o centro do antebraço, via glTranslate().
glPushMatrix(); glScalef (2.0, 0.4, 1.0); glutWireCube (1.0); glPopMatrix(); |
O antebraço é desenhado de forma semelhante ao braço: as escalas dos eixos coordenados são ajustadas e o cubo de aresta 1 é desenhado, sempre preservando as dimensões do sistema de coordenadas original.
glPopMatrix(); glutSwapBuffers(); |
A função glPopMatrix() remove a matriz de transformação do topo da pilha, fazendo-a corrente, retornando assim o sistema de coordenadas original. Quando glutSwapBuffers() é chamada, os buffers de desenho e de apresentação são alternados e a nova imagem do braço robótico é apresentada.
void reshape (int w, int h)
{
glViewport (0, 0, (GLsizei) w, (GLsizei) h); |
Define a área dentro da janela de desenho no sistema de coordenadas atual, origem (x,y), largura (w) e altura (h), que OpenGL pode utilizar para efetuar desenhos. Este trecho de código permite que toda a área da janela possa ser utilizada quando a janela sofrer redimensionamento.
glMatrixMode (GL_PROJECTION); glLoadIdentity (); gluPerspective(65.0, (GLfloat) w/(GLfloat) h, 1.0, 20.0); |
A função glMatrixMode() especifica a pilha de matrizes que será o alvo das operações matriciais subseqüentes; neste caso, a pilha de matrizes de projeção. A função glLoadIdentity() inicia a matriz de projeção corrente como a matriz identidade. A função gluPerspective() define a transformação de perspectiva usada no exemplo. Projeções geométricas não são alvo desta lição e por enquanto não serão estudadas.
glMatrixMode(GL_MODELVIEW); glLoadIdentity(); glTranslatef (0.0, 0.0, -5.0); |
A função glMatrixMode() especifica agora que a pilha de matrizes de modelview, usadas para definir translação, rotação e escalamento, será o alvo das transformações subseqüentes. A função glLoadIdentity() inicia a matriz de modelview corrente como a matriz identidade. Finalmente, o objeto é deslocado -5 unidades para o fundo da tela, melhorando a sua visualização.
glutReshapeFunc(reshape); |
Especifica a função de retorno para redimensionamento de janela, possuindo o seguinte protótipo:
funcao(int width, int height);
Contato Pesquisas e Projetos Publicações Home